We all are aware of the fact that robots can do things that are quite difficult for humans to handle, but sometimes simple things become complex when viewed even from the eyes of a robot. One such example is of picking up the food from a plate. The researchers at the University of Washington have successfully developed a robotic arm that can decide the best way to pick up the food regardless of its shape and bring it up to the mouth of the user. It will be quite helpful for people with limited mobility and will make their mealtimes easier.
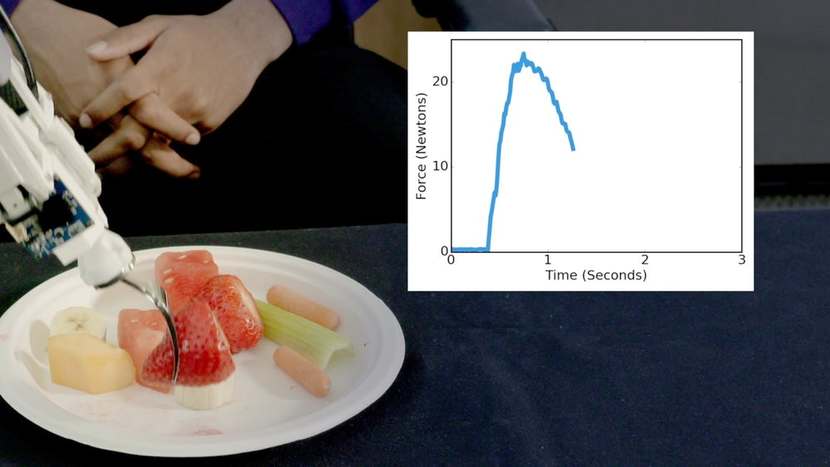
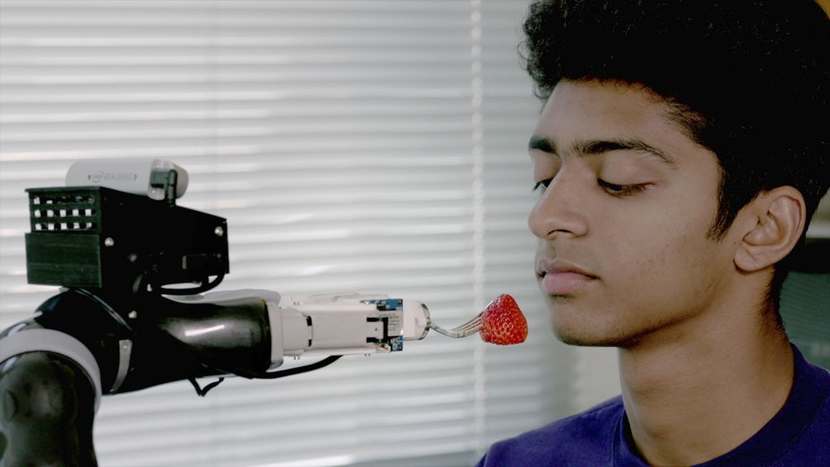
The robot is known as Assistive Dexterous Arm (ADA). It is designed in a way that it can be easily attached to the wheelchair of the person who is using it. The arm is equipped with haptic sensors, and it helps in telling them the amount of force it is applying. It comes along with a camera that is used to identify the food items on the plate, and also the person’s face it is feeding. The basic mechanism behind this innovation is when the food is to be eaten, the plate is scanned by the arm using its camera to accurately identify the size and shape of each piece of food. After figuring it out correctly, the camera then scans the diner’s face, so that the fork can be moved within comfortable biting range.
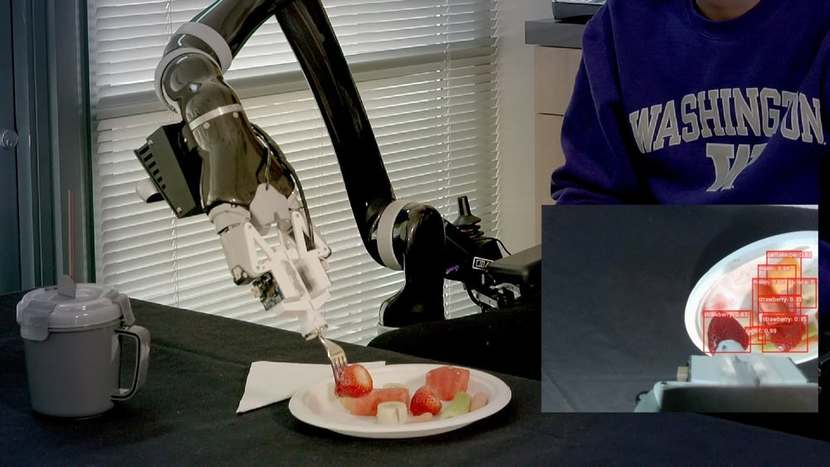
The algorithms behind these actions are far more complicated than one would expect. The first algorithm that is used is RetinaNet, which is mainly designed to scan the plate and place a virtual frame around it after identifying the food item. The second algorithm that is used is SPNet, which analyzes each frame for the type of food, and also decides the best way to pick it up.
All of the algorithms were developed after conducting tests on human subjects. The tests evaluated how the subjects handle different types of food, including soft foods like bananas, relatively hard foods like carrots, also those that have thick skins but soft innards like grapes. The tests also recorded how much force is needed to be applied to different types of foods. In addition to this, certain tricks were also recorded that we don’t even realize are being utilized in our daily life while having a meal.
According to the corresponding author of the study, Siddhartha Srinivasa, the ultimate challenge is to devise strategies that can deal with all types of food available. They must take into account that the whole process should be easy for a person who is taking a bite.
The ADA’s algorithms are all incorporated with the results of these tests, thus making it more user-friendly. According to Srinivasa, the ultimate goal is to empower people with less mobility and to have their lunch and dinner with less reliance on caregivers. The point is not to replace the caregivers, but in fact, the robotic arm will help them do other important work while the person eats.
The research was published in the journal IEEE Robotics and Automation Letters.
Source: University of Washington (via: New Atlas)